Moteur servo à courant continu de précision 46S/12V-8C1

Caractéristiques de base du servomoteur DC : (autres modèles, les performances peuvent être personnalisées)
| 1. Tension nominale : | C.C 12 V | 5. Vitesse nominale : | ≥ 2600 tr/min |
| 2. Plage de tension de fonctionnement : | C.C 7,4 V-13 V | 6. Courant de blocage : | ≤2,5A |
| 3. Puissance nominale : | 25W | 7. Courant de charge : | ≥1A |
| 4. Sens de rotation : | L'arbre de sortie CW est au-dessus | 8. Dégagement de l'arbre : | ≤1,0 mm |
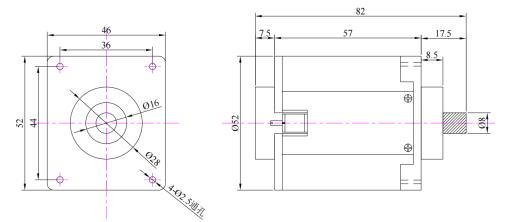
Diagramme d'apparence du produit
Temps d'expiration
À compter de la date de production, la période d'utilisation sûre est de 10 ans, temps de travail continu ≥2000 heures.
Caractéristiques du produit
1. Conception compacte et peu encombrante ;
2. Structure à roulement à billes ;
3, longue durée de vie de la brosse;
4, l'accès externe de la brosse permet un remplacement facile et peut prolonger encore la durée de vie du moteur ;
5. Couple de démarrage élevé ;
6, peut effectuer un freinage dynamique pour s'arrêter plus rapidement ;
7. Rotation réversible ;
8. Connexion simple à deux fils ;
9, isolation de qualité F, utilisant un collecteur de soudage à haute température.
Applications
Il est largement utilisé dans la maison intelligente, les équipements médicaux de précision, le domaine de la conduite automobile, les séries de produits électroniques grand public, les équipements de massage, les outils de soins personnels, la transmission de robots intelligents, l'automatisation industrielle, les équipements mécaniques automatiques, les produits numériques et d'autres domaines.
Principe de fonctionnement du servomoteur
Tant que le servo dépend de l'impulsion à positionner, cela peut être compris de cette façon, le servomoteur reçoit une impulsion, il tournera l'angle correspondant d'une impulsion, de manière à obtenir un déplacement. Étant donné que le servomoteur lui-même a pour fonction d'envoyer des impulsions, le nombre correspondant d'impulsions sera envoyé pour chaque angle de rotation du servomoteur. De cette manière, l'impulsion reçue par le servomoteur est répercutée, ou appelée boucle fermée. De cette façon, le système saura combien d'impulsions sont envoyées au servomoteur et combien d'impulsions sont reçues en retour, de sorte qu'il puisse contrôler très précisément la rotation du moteur, afin d'obtenir un positionnement précis, pouvant atteindre 0,001 mm. .
Illustration des performances



Catégories de produits
-

Moteur servo à courant continu de précision 46S/7,4 V-8A1
-

Moteur servo à courant continu de précision 46S/12V-8B1
-

Moteur servo à courant continu de précision 46S/220V-8B
-

Moteur servo à courant continu de précision 46S/12V-8A1
-

Moteur servo à courant continu de précision 46S/185-8A
-

Servomoteur DC 46S/110V-8B

