Moteur servo à courant continu de précision 46S/12V-8A1

Caractéristiques de base du servomoteur DC : (autres modèles, les performances peuvent être personnalisées)
| 1. Tension nominale : | C.C 12 V | 5. Vitesse nominale : | ≥ 2600 tr/min |
| 2. Plage de tension de fonctionnement : | C.C 7,4 V-13 V | 6. Courant de blocage : | ≤2,5A |
| 3. Puissance nominale : | 25W | 7. Courant de charge : | ≥1A |
| 4. Sens de rotation : | L'arbre de sortie CW est au-dessus | 8. Dégagement de l'arbre : | ≤1,0 mm |
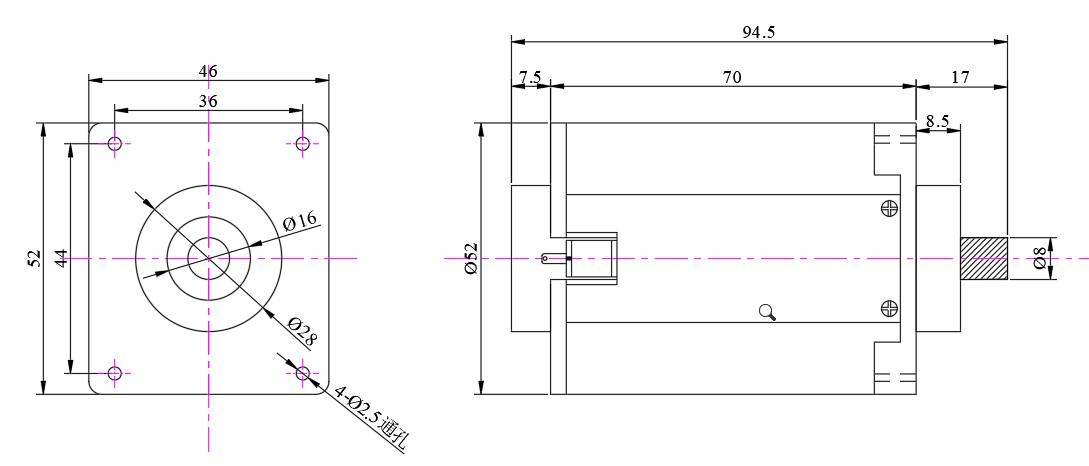
Diagramme d'apparence du produit
Temps d'expiration
Depuis la date de production, la période d'utilisation sûre du produit est de 10 ans et la durée de travail continue est ≥ 2000 heures.
Caractéristiques du produit
1. Conception compacte et peu encombrante ;
2. structure à roulement à billes ;
3. Longue durée de vie de la brosse ;
4. L'accès externe aux brosses permet un remplacement facile pour prolonger davantage la durée de vie du moteur.
5. Couple de démarrage élevé ;
6. Freinage dynamique pour arrêter plus rapidement ;
7. rotation réversible ;
8. Connexion Simple à deux fils ;
9. Isolation de classe F, commutateur de soudage à haute température.
10.Avec un fonctionnement stable et à faible bruit, il est particulièrement adapté aux occasions nécessitant une vitesse élevée et un faible bruit.
Applications
Il est largement utilisé dans les domaines de la maison intelligente, des appareils médicaux de précision, de la conduite automobile, des produits électroniques grand public, des équipements de massage et de soins de santé, des outils de soins personnels, de la transmission de robots intelligents, de l'automatisation industrielle, des équipements mécaniques automatiques, des produits numériques, etc.
Illustration des performances



Quelles sont les caractéristiques du servomoteur DC
Dans un servomoteur à courant continu, il existe un courant continu (CC) avec des bornes positives et négatives. Entre chacune de ces bornes, le courant circule exactement dans le même sens. L'inertie du servomoteur doit être plus petite pour plus de précision et d'exactitude. Les servos DC ont une réponse rapide, obtenue en maintenant un rapport couple/poids élevé. De plus, la caractéristique de vitesse du servo DC doit être linéaire.
Avec un servomoteur à courant continu, le contrôle du courant est beaucoup plus simple qu'avec un servomoteur à courant alternatif, car la seule exigence de contrôle est l'amplitude d'induit du courant. La vitesse du moteur est contrôlée par une modulation de largeur d'impulsion (PWM) contrôlée par rapport cyclique. Le flux de contrôle est utilisé pour gérer le couple, ce qui entraîne une cohérence fiable tout au long de chaque cycle d'activité.
Les servomoteurs à courant continu ont tendance à avoir une plus grande inertie que les moteurs à courant alternatif à cage d'écureuil. Ceci et la résistance accrue au frottement des balais sont les principaux facteurs empêchant leur utilisation dans les servos d’instruments. Dans les petites tailles, les servomoteurs à courant continu sont principalement utilisés dans les systèmes de contrôle des avions où les contraintes de poids et d'espace exigent que le moteur fournisse une puissance maximale par unité de volume. Ils sont généralement utilisés pour un service intermittent ou lorsqu'un couple de démarrage inhabituellement élevé est requis. Les servomoteurs CC peuvent également être utilisés dans les actionneurs électromécaniques, les contrôleurs de processus, les équipements de programmation, les robots d'automatisation industrielle, les équipements de machines-outils CNC et de nombreuses autres applications de nature similaire.
Un servomoteur à courant continu est un ensemble composé de quatre composants principaux, à savoir un moteur à courant continu, un dispositif de détection de position, un engrenage et un circuit de commande. La vitesse requise d'un moteur à courant continu dépend de la tension appliquée. Pour contrôler la vitesse du moteur, le potentiomètre produit une tension qui est appliquée à l'une des entrées de l'amplificateur d'erreur.
Catégories de produits
-

Servomoteur DC 46S/110V-8B
-

Moteur servo à courant continu de précision 46S/220V-8A
-

Moteur servo à courant continu de précision 46S/220V-8B
-

Moteur servo à courant continu de précision 46S/12V-8C1
-

Moteur servo à courant continu de précision 46S/12V-8B1
-

Moteur servo à courant continu de précision 46S/7,4 V-8A1

